
ميتـا تكشف عن أدوات الذكاء الاصطناعي لإضفاء لمسة إنسانية على الروبوتات في العالم الحقيقي!
انضم إلى نشراتنا اليومية والأسبوعية للحصول على آخر التحديثات والمحتوى الحصري حول تغطية الذكاء الاصطناعي الرائدة في الصناعة. تعرف على المزيد
ميتا أعلنت هذا الأسبوع عن عدة إعلانات هامة تتعلق بالروبوتات وأنظمة الذكاء الاصطناعي المجسدة. يشمل ذلك إصدار معايير وأدوات لفهم أفضل والتفاعل مع العالم المادي. تركز Sparsh وDigit 360 وDigit Plexus، وهي ثلاثة أدوات بحثية أصدرتها ميتا، على إدراك اللمس، ومهارة الروبوت، والتفاعل بين الإنسان والروبوت. كما أن ميتا تطلق PARTNR وهو معيار جديد لتقييم التخطيط والاستدلال في التعاون بين الإنسان والروبوت.
يأتي هذا الإصدار في وقت تجدد فيه الاهتمام بالروبوتات بفضل التقدم في النماذج الأساسية، حيث تقوم شركات الذكاء الاصطناعي تدريجياً بتوسيع نطاق سباقها من المجال الرقمي إلى العالم المادي.
هناك أمل متجدد في الصناعة بأن تساعد النماذج الأساسية مثل نماذج اللغة الكبيرة (LLMs) ونماذج اللغة والرؤية (VLMs) الروبوتات على إنجاز مهام أكثر تعقيدًا تتطلب الاستدلال والتخطيط.
الإدراك اللمسي
Sparsh، الذي تم إنشاؤه بالتعاون مع جامعة واشنطن وجامعة كارنيجي ميلون، هو مجموعة من نماذج الترميز لإدراك اللمس القائم على الرؤية. يهدف إلى تزويد الروبوتات بقدرات إدراك اللمس. يعد الإدراك اللمسي أمرًا حيويًا لمهام الروبوتات مثل تحديد مقدار الضغط الذي يمكن تطبيقه على جسم معين لتجنب إتلافه.
النهج التقليدي لدمج أجهزة استشعار اللمس القائمة على الرؤية في مهام الروبوت هو استخدام بيانات مصنفة لتدريب نماذج مخصصة يمكنها توقع حالات مفيدة. لا يعمم هذا النهج عبر أجهزة الاستشعار والمهام المختلفة.
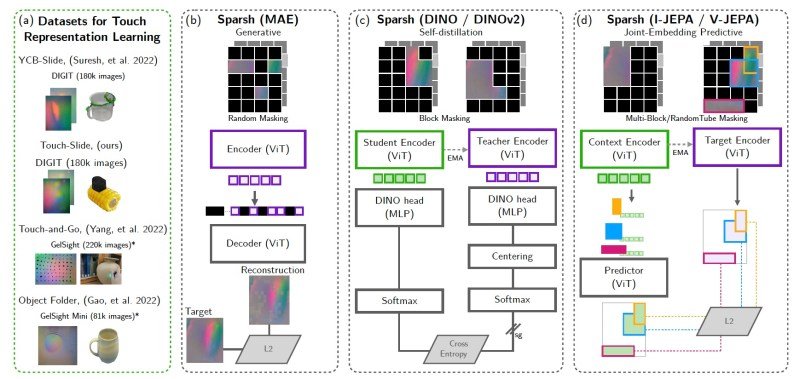
تصف ميتا Sparsh كنموذج متعدد الأغراض يمكن تطبيقه على أنواع مختلفة من أجهزة استشعار اللمس القائمة على الرؤية ومختلف المهام. للتغلب على التحديات التي واجهتها الأجيال السابقة من نماذج الإدراك اللمسي، قام الباحثون بتدريب نماذج Sparsh من خلال التعلم الذاتي الإشراف (SSL)، مما يلغي الحاجة إلى بيانات مصنفة. تم تدريب النموذج باستخدام أكثر من 460,000 صورة لمسية تم تجميعها من مجموعات بيانات مختلفة. وفقًا لتجارِب الباحثين، حقق Sparsh متوسط تحسين بنسبة 95.1% مقارنة بالنماذج الخاصة بالمهمة والحساس تحت ميزانية محدودة للبيانات المصنفة. وقد أنشأ الباحثون نسخًا مختلفة من Sparsh بناءً على هياكل متنوعة بما في ذلك نموذج I-JEPA ونموذج DINO الخاص بميتا.
أجهزة استشعار اللمس
تقييم التعاون بين الإنسان والروبوت
< P > تقوم شركة Meta أيضًا بإطلاق المهام التخطيط والاستنتاج فِي التعاون البيني بين الإنسان والروبوت (< a href =' https :// ai.meta.com/research/publications/partnr-a-benchmark-for-planning-and-reasoning-in-embodied-multi-agent-tasks/'target='_blank'rel=noreferrer noopener>‘PARTNR’) وهو معيار يُستخدم تقييم فعالية نمادِ الجيل الجديد عندما يتعاونوا مع البشر فِي المهام المنزلية .
< P > يعتمد PARTNR عَلَى Habitat البيئة المحاكاة الخاصة بشركةMeta ويحتوي عَلَى100,000 مهمة باللغة الطبيعية فِي60 منزل ويتضمن أكثَر مِن5,800 كائن مُتميز.
صُممت المعايير بهدف تقييم أداء LLMs و VLMs عند اتباع التعليمَ ات البشرية .
تعتبر المعايير الجديدة لشركةMeta جزءًا مِن عددٍ متزايدٍ مِن المشاريع التي تستكشف استخدام LLMs و VLMs فِي إعدادَ ات روبو تكية وعالم AI المجسد.
خلال العام الماضي أظهرت هذه النما ذ ج وعد كبير ليكون بمثابة وحدَ ات تخطيط واستنتاج للروبو تة أثناء تنفيذ المهامات المعقدة.
قامت الشركات الناشيئة مثل Figure و Covariant بتطوير بروتو تايب تستخدم فيها النما ذ ج الأساسي للتخطيط .
وفي نفس الوقت تعمل مختبرَ ات AI عَلى إنشاء نَمَا ذ ج أساسي أفضل للروبو تة .
مثالٌ عَلى ذلك مشروع Google DeepMind RT-X والذي يجمع مجموعَّ ات البيانات المختلفة القادمة مِن عدة رو بو تُوات ليُدرِّب نموذج رؤية ولغة وفعل(VLA) يُعمِّق الفهم لأشكال وأنواع متعددة ومتنوعة للمهمَّ ا ت المتعددة .
.VB Daily
.ابقى مطلعاً! احصل علَى أحدث الأخبار يومياً عبر بريدكَ الإلكتروني
.عند الاشتراك توافق علَى شروط خدمة VentureBeat
.شكراً للاشتراك تحقق مزيدٌ هنا
An error occured.
.VB Daily
.ابقى مطلعاً! احصل علَى أحدث الأخبار يومياً عبر بريدكَ الإلكتروني


